
Rookie Awards 2022 Trilogy Entry
Three projects that I have completed in the last year or so, each displaying different aspects of my work in 3D.
Rookie Awards 2022 Trilogy Entry
This entry is broken up into three different projects. They are not related to each other and each show different aspects of my work. This includes 1) a complete game environment rendered in UE5, 2) a high-poly model of a Rimac Nevera and, 3) a project which focused more on the design aspect of creating an object, in this case a cybernetic arm, as well as integrating lore and functionality into the project.
Project 1: Lethal Seaside
My design brief for this project was relatively simple and largely inspired by Hitman: A room in a seaside resort or hotel, used as a hideout by an assassin hunting the members of a criminal organization.















Procces
From whitebox to final scene. The initial starting point for me in creating this scene was the theme as well as the very basic layout of the room as seen in the whiteboxing below. From there I made basic textures for the room to start working on the colour palette of the scene.





Furniture
Afterwards I repeated the same process with the furniture, creating a base set that I could use to finalize the room.



Structure & Lighting
With the base elements in place, now I could start to finalize the scene by playing around with the structure and layout of the room, as well as the both the position and colour of the lighting.
Firstly, the room was too square and felt too empty towards the top, so I experimented with arches and a curved roof to alleviate this.




The central archways felt too cramped and didn't make much architectural sense, so I settled on the above structure, with some slight layout changes to the furniture and a revamp of the lighting to complete the final scene.
Below is a breakdown of the lighting and well as the unlit scene and the wireframe view.





Cliffs and plants from Quixel Megascans. Photographs created using Metahuman. Painting is "Paris, vu de la Butte Montmartre" by Louis Jacques Mandé Daguerre.
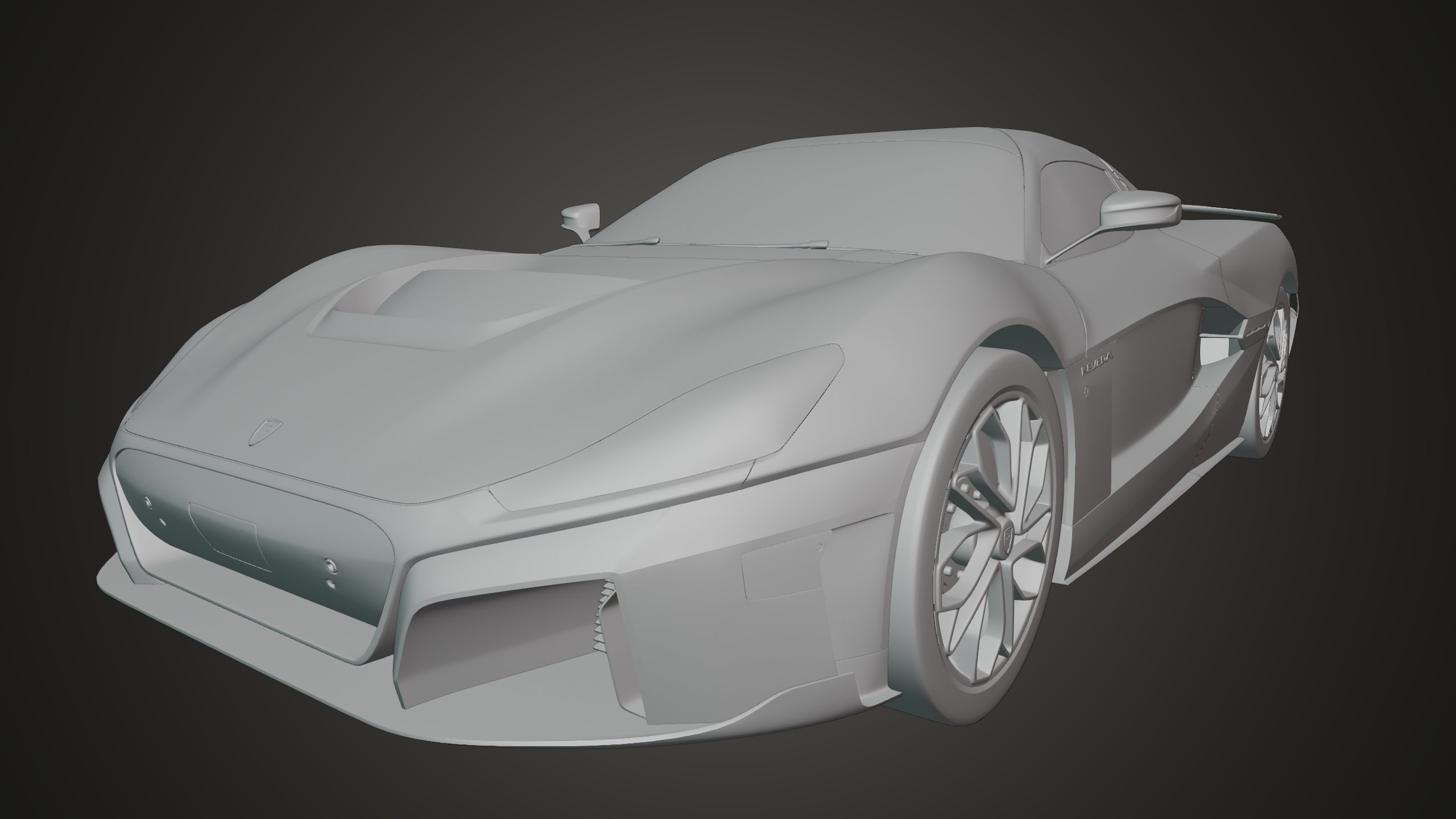
Project 2: Rimac Nevera
A high-poly mode of a Rimac Nevera rendered in UE5. I have made a few models of the Rimac C2 over the years which would eventually become the Nevera and this is the final result. A big focus for this project was topology, and the end goal was to make a high-poly model which could be used in cinematics and also converted into a low-poly in-game model.
Background scene is the Automotive Winter Scene by Epic Games































Wireframe & Mesh









Project 3: Model KA-IV
This project is a little different from the other two. Here the focus was threefold:
Firstly was designing a cybernetic arm without the limit of it being implemented in a game or game enviroment.
Secondly was integrating lore into and around the arm; to think about how it would exist in a fictional cyberpunk world, and what would characterize the fictional company - Hermann Kruger - who manufacture it.
Thirdly, and also relating to the lore, was thinking about the practicality of the arm as a product. Not in the sense that this is an engineering diagram, but thinking about how this product would actually be manufactured, assembled, used and repaired. You should be able to look at it and think how that could work and make sense in-lore.
Part of this project was developing this (albeit very barebones) world which the arm would exist in, and developing some in-lore marketing for the KA-IV and Hermann Kruger, as seen on the poster below. The above video, while here serving to show the arm actually moving, could also be imagined to be part of a billboard or video ad, if you incorporated some the elements found on the poster.
In-lore the arm is initially geared towards military or industrial purposes. But the fact that it is cheap and durable leads to the arm finding universal appeal: It's not the best replacement for a human arm, but for many people in this world it's good enough.

And finally some still renders. The ones with holographic objects serve to display the functionality of the arm performing various tasks. Again, these could be used in-lore either for demonstration or marketing.
The primary idea for the design of the arm is that it should be something rugged and reliable but also relatively cheap and widely available. A thought I had early on was thinking of it as the cybernetic arm equivalent of the AK. This is reflected in the hefty construction of the arm and the modularity of it's assembly. Most parts can be easily replaced if they should break.
Some parts are too complex for this type of assembly though; an example is the bionic adapter found at the end of the arm. This is the part that would be surgically implanted into an interface in your body, which makes on-the-fly repairs rather challenging. In general, the further you go towards the hand, the more the arm can easily be disassembled and repaired - these are also the parts most likely to need repair.

















While neither the rig nor the topology of the model were the focus of this project, here they can be seen. The arm is rigged with IK's but I only used them sparingly for some poses.
Thank you for viewing!




Comments (0)
This project doesn't have any comments yet.